

У дитинстві я любив дивитися мультфільми з машинками, які ніби самі їздять. Це змусило мене задуматися, чи такі автомобілі можуть бути справжніми і чи є всередині крихітні роботи, які керують ними магічним чином.
Оскільки ми старіємо, безпілотні автомобілі стають реальністю! Я щиро зачарований ними. Чи розуміють вони, наприклад, коли зупинятися перед знаками зупинки та червоним світлом? Чи можуть вони навіть побачити тварин і людей, які ходять по дорозі? А як щодо їзди, коли на вулиці темно або коли погода дощова чи снігова?

Поговоримо про безпілотні автомобілі! Це автомобілі, які можуть їздити самостійно без людини-водія. Такі компанії, як Tesla та Waymo, використовують інтелектуальні комп’ютерні методи, як-от глибоке навчання, щоб зробити ці автомобілі надзвичайно розумними. Глибоке навчання допомагає автомобілям робити цікаві речі, наприклад розуміти дорожні знаки та безпечно керувати автомобілем навіть за жахливої погоди. Вся справа у використанні передових технологій для формування того, як ми будемо рухатися в майбутньому!
історія
Історія безпілотних автомобілів схожа на довгу захоплюючу пригоду. Уявіть собі 1920-ті роки, коли автономні транспортні засоби все ще були лише мрією людей. Один винахідливий розум, Френсіс Гудіна, виділявся, створивши автомобіль, який слідував лініям дороги. Однак для його спрямування потрібні були спеціальні приховані дроти під дорогою.
 Джерело: theatlantic.com
Джерело: theatlantic.com
Переходячи до 1980-х і 1990-х років, геніальні уми Університету Карнегі-Меллона мали на меті щось велике. Вони розробили автомобілі, які могли «бачити» за допомогою камер, допомагаючи їм пересуватися жвавими вулицями міста. Ці автомобілі були ніби дослідниками, які вивчали, як керувати автомобілем, дивлячись навколо.
Потім у 2004 році настав важливий момент, який розгортався на тлі виклику пустелі. Безпілотні автомобілі вийшли на сцену, намагаючись взяти участь у складній гонці – гонці, яку вони не виграли, але це був початок. Подумайте про це як про їхній тренувальний майданчик, щоб стати кращими водіями.
Однак справжній прорив стався в 2000-х і 2010-х роках, коли такі великі компанії, як Tesla, Uber і Google (нині Waymo), увійшли в автомобільний сектор. Google почав тестувати безпілотні автомобілі в 2009 році. У 2015 році автомобілі Tesla представили функцію, за допомогою якої вони могли частково самостійно їздити певними дорогами. Вони могли керувати та залишатися на дорозі без постійного контролю з боку людини.
У міру того як до перегонів приєдналося більше компаній, конкуренція за створення повністю безпілотних автомобілів загострилася. Уявіть, як команди винахідників змагаються, щоб створити автомобілі, які могли б керувати автомобілем без допомоги людей.
Але історія продовжується. Ми все ще працюємо над створенням автомобілів, які можуть їздити самостійно, що змінить наш спосіб подорожей. Ця пригода все ще відбувається, і це означає, що ми можемо мати безпечніші та простіші подорожі, оскільки ці модні безпілотні автомобілі стають кращими.
Як працюють безпілотні автомобілі?
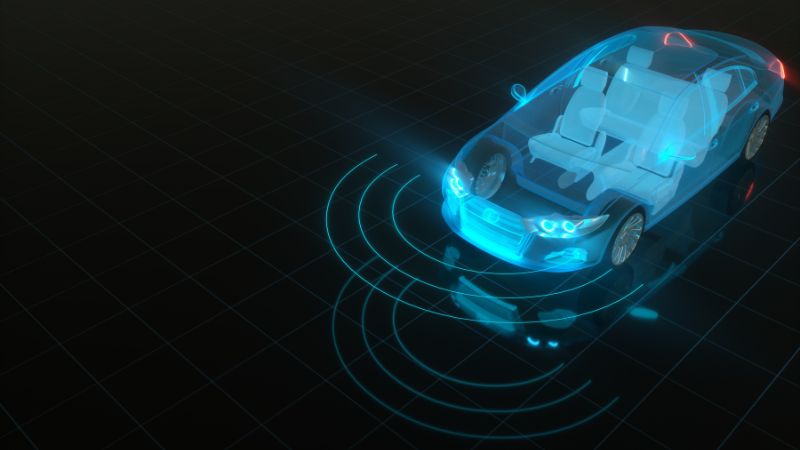
Безпілотні автомобілі — це суперрозумні люди, які приймають рішення! Вони використовують камери, LiDAR, RADAR, GPS та датчики інерції, щоб збирати дані про своє оточення. Потім спеціальні алгоритми, які називаються алгоритмами глибокого навчання, обробляють ці дані, щоб зрозуміти, що відбувається навколо них. Грунтуючись на цьому розумінні, вони приймають важливі рішення щодо безпечного та плавного водіння.
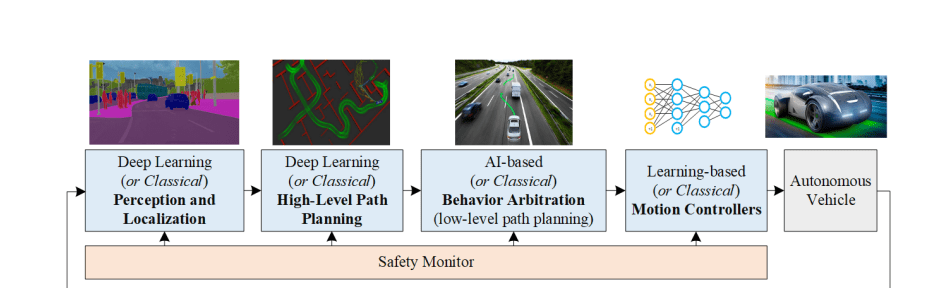 Джерело: arxiv.org
Джерело: arxiv.org
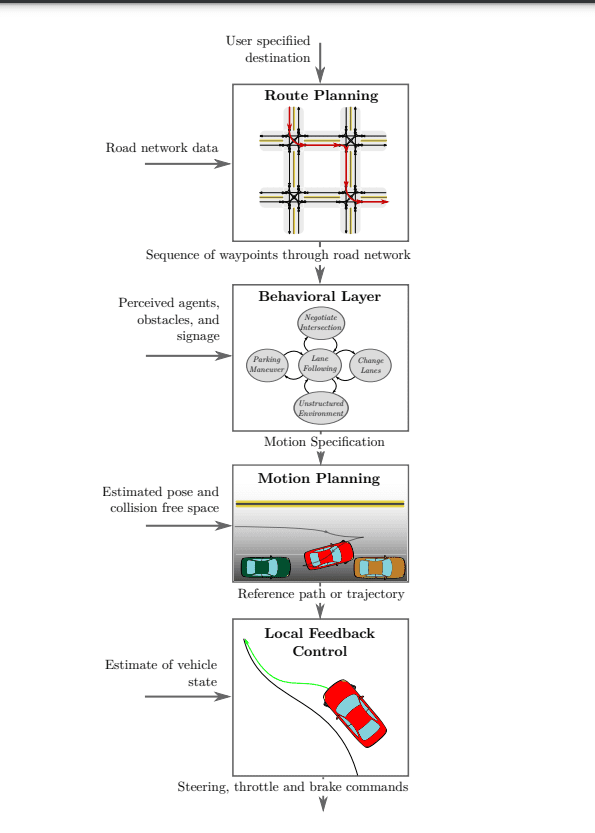
Якщо ми хочемо зрозуміти, як насправді працюють безпілотні автомобілі, давайте уважніше розглянемо ці чотири частини, показані на схемі вище. Це схоже на вирішення головоломки – розуміння кожної деталі допоможе нам побачити ширшу картину того, як працюють ці дивовижні автомобілі:
- Сприйняття
- Локалізація
- Прогнозування
- Прийняття рішень
- Планування шляху високого рівня
- Поведінковий арбітраж
- Контролер руху
Сприйняття
#1. Камера
Камери схожі на очі безпілотного автомобіля – вони надзвичайно важливі! Вони допомагають машині знати, що відбувається навколо неї. Ці камери виконують різні завдання, наприклад визначають, що є, відокремлюють різні частини та визначають, де знаходиться автомобіль.
Щоб автомобіль нічого не пропустив, він має камери, розташовані спереду, ззаду, ліворуч і праворуч. Ці камери працюють разом, щоб створити велике зображення всього навколо автомобіля. Це ніби особливий круговий огляд автомобіля на 360 градусів!

Ці камери не просто для показу. Вони розумні. Деякі дивляться далеко, до 200 метрів, щоб машина знала, що попереду. Інші зосереджуються на речах поблизу, щоб автомобіль міг звернути пильну увагу на деталі. Ця команда камер допомагає автомобілю бачити та розуміти все, як друг, який керує нею, щоб вона могла безпечно їздити та робити правильний вибір.
Іноді камери надзвичайно корисні, наприклад під час паркування, оскільки вони показують широкий огляд і допомагають зробити правильний вибір для обережного водіння.
Але використання камер лише для спостереження за речами викликає проблеми, особливо в сувору погоду, як-от туман, сильний дощ, і вночі. У ці часи зображення з камер можуть виглядати дивно та брудно, що може бути дуже небезпечно.
Щоб впоратися з цими складними ситуаціями, нам потрібні спеціальні датчики, які можуть працювати, коли дуже темно або навіть зовсім вночі. Вони також повинні мати можливість вимірювати, наскільки далеко знаходяться речі, не потребуючи світла, яке ми можемо бачити. Коли ми розміщуємо ці датчики в очах автомобіля (система сприйняття), автомобіль стає краще керувати за поганої погоди або коли його погано видно. Таким чином, автомобіль може їздити більш безпечно, що чудово підходить для всіх, хто їде по дорозі.
#2. ЛіДАР
LiDAR, що означає Light Detection And Ranging, — це дивовижна технологія, яка використовує лазери, щоб визначити, наскільки далеко знаходяться речі. LiDAR посилає лазерні промені та вимірює, скільки часу їм потрібно, щоб повернутися з речей.

Коли LiDAR і камери працюють разом, вони допомагають машині чіткіше розуміти речі. Він створює 3D-карту навколо автомобіля. Потім цю спеціальну інформацію можна переглянути за допомогою інтелектуальних комп’ютерних програм, які допомагають автомобілю вгадати, що можуть робити інші автомобілі. Це корисно, коли дорога складна, наприклад, на жвавих перехрестях, оскільки автомобіль може спостерігати за іншими автомобілями та їхати безпечно.
Однак LiDAR має обмеження, які можуть бути проблематичними. Хоча він добре працює вночі та в темряві, він може працювати в умовах дощу чи туману, що може призвести до неточностей у сприйнятті. Для вирішення цих проблем ми використовуємо датчики LiDAR і RADAR одночасно. Ці датчики надають додаткову інформацію, яка допомагає автомобілю чіткіше розуміти речі. Автомобіль може їздити самостійно безпечніше та краще.
#3. РАДАР
RADAR, що розшифровується як Radio Detection and Ranging, давно використовується в повсякденних речах, а також у військових. RADAR, який спочатку використовувався військовими для виявлення об’єктів, обчислює відстані за допомогою радіосигналів. Сьогодні РАДАР життєво важливий у багатьох автомобілях, особливо в безпілотних.
RADAR чудовий, тому що він може працювати за будь-якої погоди та освітлення. Замість лазерів він використовує радіохвилі, що робить його гнучким і надзвичайно корисним. Однак RADAR вважається шумним датчиком, а це означає, що він може виявляти перешкоди, навіть якщо камера їх не бачить.
Мозок безпілотного автомобіля може заплутатися від усіх додаткових сигналів RADAR, які ми називаємо «шумом». Щоб виправити це, автомобіль повинен очистити інформацію RADAR, щоб він міг зробити правильний вибір.
Очищення даних означає використання спеціальних прийомів, щоб відрізнити сильні сигнали від слабких, наприклад, відокремити важливі речі від не дуже важливих. Автомобіль використовує хитрий трюк під назвою швидке перетворення Фур’є (ШПФ), щоб ще краще розуміти інформацію.
RADAR і LiDAR дають інформацію про окремі точки, як точки на папері. Щоб краще зрозуміти ці точки, автомобіль використовує щось на зразок групування. Це як коли ви збираєте схожі речі разом. Автомобіль використовує розумні статистичні методи, такі як Евклідова кластеризація або K-means Clustering, щоб об’єднати схожі точки та зрозуміти їх. Завдяки цьому автомобіль може їздити розумніше та безпечніше.
Локалізація
У безпілотних автомобілях алгоритми локалізації відіграють вирішальну роль у визначенні положення та орієнтації транспортного засобу під час його руху, відомого як візуальна одометрія (VO). VO функціонує шляхом визначення та зіставлення ключових моментів у послідовних відеокадрах.
Автомобіль дивиться на спеціальні точки в інформації, як позначки на карті. Після цього автомобіль використовує статистику під назвою SLAM, щоб дізнатися, де знаходяться речі та як вони рухаються. Це допомагає автомобілю знати, що навколо, як-от дороги та люди.

І щоб зробити це ще краще, автомобіль використовує так зване глибоке навчання. Це як суперрозумний комп’ютер.
Ці трюки дозволяють машині добре розуміти речі. Нейронні мережі, такі як PoseNet і VLocNet++, використовують дані точок для оцінки 3D-положення та орієнтації об’єктів. Ці передбачувані 3D-положення та орієнтації потім можна використовувати для отримання семантики сцени, як показано на зображенні нижче. Коли автомобіль використовує математику та розумні комп’ютерні трюки, він знає, де він і що навколо нього. Це допомагає автомобілю безпечно та плавно їздити самостійно.
Прогнозування
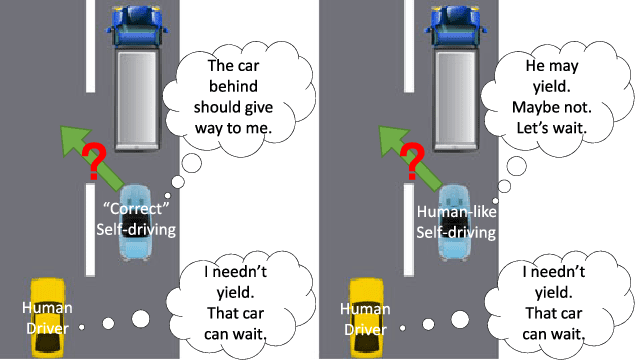
Розуміння людських водіїв справді є складним завданням, оскільки воно включає емоції та реакції, а не просту логіку. Оскільки ми не знаємо, що робитимуть інші водії, для безпілотних автомобілів дуже важливо правильно здогадуватися про свої дії. Це допомагає забезпечити безпеку на дорозі.
Уявіть, що безпілотні автомобілі мають очі навколо, ніби огляд на 360 градусів. Це дозволяє їм бачити все, що відбувається. Вони використовують цю інформацію для глибокого навчання. Автомобіль використовує розумні методи, щоб передбачити, що можуть зробити інші водії. Це схоже на гру, де ви заздалегідь плануєте досягти успіху.
 Прогнозування за допомогою глибокого навчання
Прогнозування за допомогою глибокого навчання
Спеціальні датчики в безпілотних автомобілях схожі на очі. Вони допомагають автомобілям знати, що зображено на фотографіях, знаходити речі навколо них, знати, де вони знаходяться, і бачити, де все закінчується. Це допомагає автомобілю визначити, що поруч, і зробити розумний вибір.
Під час навчання алгоритми глибокого навчання моделюють складну інформацію із зображень і хмарних точок даних, отриманих із LiDAR і RADAR. Під час фактичного водіння (виведення) та сама модель допомагає автомобілю підготуватися до можливих рухів, включаючи гальмування, зупинку, уповільнення, зміну смуги руху тощо.
Глибоке навчання – це як розумний помічник для автомобіля. Це дає змогу автомобілю розуміти те, у чому він не впевнений, визначати своє місцезнаходження та керувати ним краще. Це забезпечує безпеку водіння та робить його більш плавним.
Але складна частина полягає в тому, щоб вибрати найкращу дію з кількох варіантів. Вибір правильних рухів вимагає ретельного обдумування, щоб автомобіль міг добре їхати та залишатися в безпеці.
Прийняття рішень
Безпілотним автомобілям доводиться приймати важливі рішення в складних ситуаціях, але це нелегко. Це пояснюється тим, що датчики можуть не завжди працювати правильно, і люди на дорозі можуть робити несподівані речі. Машина повинна вгадати, що будуть робити інші, і рухатися, щоб уникнути аварії.
Щоб зробити вибір, про автомобіль потрібно багато інформації. Автомобіль збирає цю інформацію за допомогою датчиків, а потім використовує алгоритми глибокого навчання, щоб зрозуміти, де що знаходиться, і передбачити, що може статися. Локалізація допомагає автомобілю знати його початкове положення, тоді як передбачення генерує кілька можливих дій на основі середовища.
Проте залишається відкритим питання: як автомобіль вибирає найкращу дію серед багатьох передбачених?
 Джерело: semanticscholar.org
Джерело: semanticscholar.org
Глибоке навчання з підкріпленням (DRL) — це техніка прийняття рішень, яка використовує алгоритм під назвою «Марковський процес прийняття рішень» (MDP). MDP допомагає припустити, як люди на дорозі можуть поводитися в майбутньому. Коли рухається більше речей, усе стає складніше. Це означає, що самокерований автомобіль повинен думати про ще більше можливих дій.
Щоб вирішити проблему пошуку найкращого ходу для автомобіля, модель глибокого навчання оптимізовано за допомогою байєсівської оптимізації. У деяких випадках для прийняття рішень використовується структура, що поєднує приховану марковську модель і байєсівську оптимізацію, що дозволяє безпілотному автомобілю ефективно та безпечно орієнтуватися в різних складних сценаріях.
 Джерело: arxiv.org
Джерело: arxiv.org
Прийняття рішень щодо безпілотних автомобілів відбувається за ієрархічним процесом із чотирьох ключових компонентів:
Планування шляху або маршруту: на початку подорожі автомобіль визначає найкращий маршрут від свого поточного положення до бажаного пункту призначення. Мета — знайти оптимальне рішення серед різноманітних можливих маршрутів.
Арбітраж поведінки: автомобіль повинен керувати маршрутом після його планування. Автомобіль усвідомлює статичні об’єкти, такі як дороги та перехрестя, але не в змозі передбачити точні дії інших водіїв. Щоб впоратися з цією невизначеністю, ми використовуємо інтелектуальні методи планування, такі як процеси прийняття рішень за Марковим (MDP).
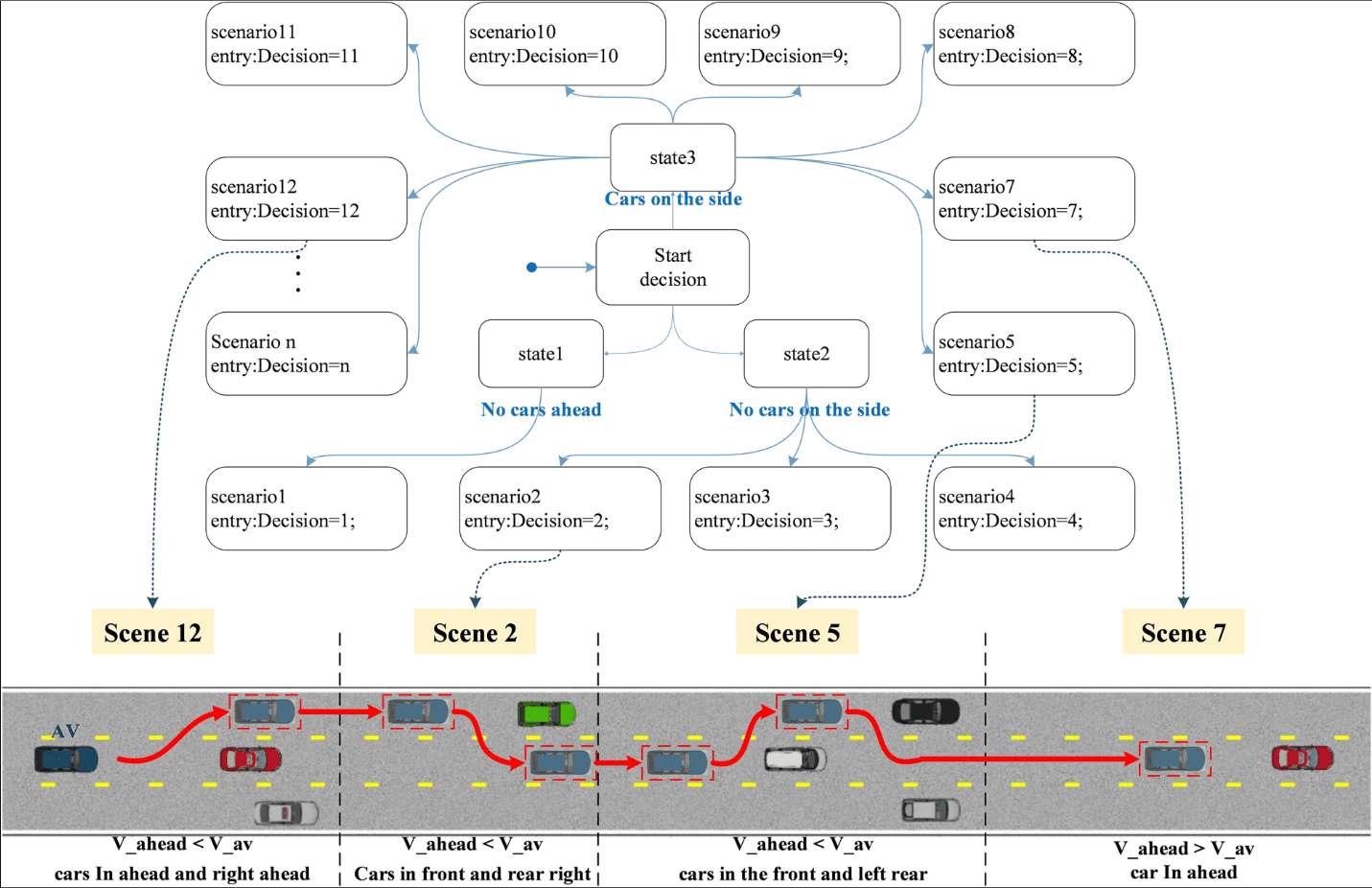 Сценарне рішення верхньої державної машини
Сценарне рішення верхньої державної машини
Планування руху: із запланованим маршрутом і рівнем поведінки, що визначає, як ним рухатися, система планування руху координує рух автомобіля. Це означає переконатися, що автомобіль рухається безпечно та комфортно для людей усередині. Він думає про те, як швидко він їде, змінює смугу руху та що навколо нього.
Управління транспортним засобом: Останнім кроком є керування транспортним засобом, яке виконує контрольну траєкторію, згенеровану системою планування руху, забезпечуючи плавне та безпечне переміщення автомобіля по призначеній траєкторії.
Розбиваючи процес прийняття рішень на ці різні частини, безпілотні автомобілі можуть добре та безпечно їздити у складних місцях. Завдяки цьому пасажири матимуть спокійну та комфортну поїздку.
Згорткові нейронні мережі
Згорткові нейронні мережі (CNN) широко використовуються в безпілотних автомобілях завдяки їхній здатності моделювати просторову інформацію, зокрема зображення. CNN чудово виділяють особливості із зображень, що робить їх корисними для з’ясування багатьох різних речей.
У CNN зі збільшенням глибини мережі різні рівні вловлюють різні шаблони. Ранні шари виявляють прості елементи, як-от краї, тоді як глибші шари розпізнають складніші, як-от форми об’єктів (наприклад, листя на деревах або шини на автомобілях). Ця адаптивність є причиною того, що CNN є центральним алгоритмом у безпілотних автомобілях.
Основним компонентом CNN є згортковий рівень, який використовує згорткове ядро (матрицю фільтра) для обробки локальних областей вхідного зображення.
Матриця фільтра оновлюється під час навчання, щоб отримати значущі ваги. Фундаментальною властивістю CNN є розподіл ваги, коли однакові параметри ваги використовуються для представлення різних перетворень, заощаджуючи простір обробки та дозволяючи різноманітні представлення функцій.
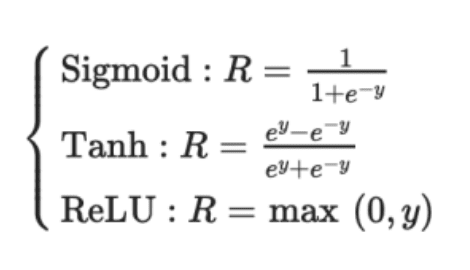
Вихідні дані згорткового шару зазвичай проходять через нелінійну функцію активації, наприклад Sigmoid, Tanh або ReLU. ReLU є кращим, оскільки він сходиться швидше, ніж інші. Крім того, результат часто проходить через шар максимального об’єднання. Це зберігає важливі деталі зображення, як-от фон і текстури.
Три важливі властивості CNN роблять їх універсальними та основними в безпілотних автомобілях:
- Локальні рецептивні поля
- Спільні ваги
- Просторова вибірка
Ці властивості зменшують переобладнання та зберігають критичні представлення та функції, важливі для класифікації зображень, сегментації, локалізації тощо.
Ось дві мережі CNN, які використовуються компаніями, що створюють безпілотні автомобілі:
- HydraNet від Tesla
- ChauffeurNet від Google Waymo
Дізнайтеся більше про згорточні нейронні мережі.
#1. HydraNet від Tesla
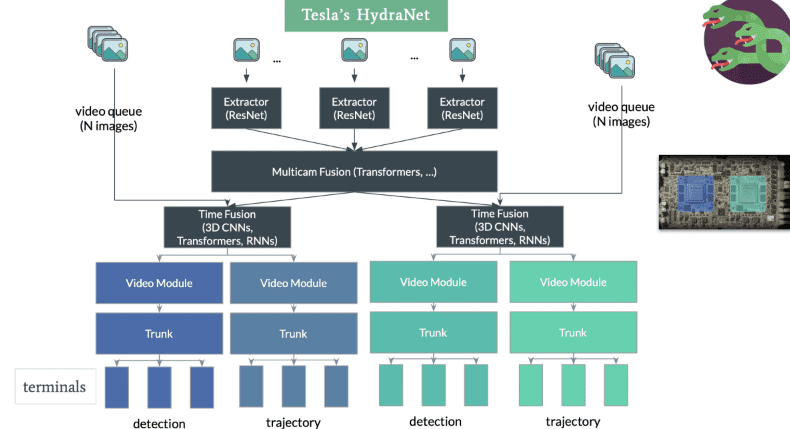
HydraNet — це динамічна архітектура, представлена Раві та ін. у 2018 році, в основному розроблений для семантичної сегментації в безпілотних автомобілях. Його основна мета — підвищити ефективність обчислень під час логічного висновку.
Концепція HydraNet передбачає наявність різних мереж CNN, які називаються філіями, призначених для виконання конкретних завдань. Кожна гілка отримує різні вхідні дані, і мережа може вибірково вибрати, які гілки запускати під час висновку, зрештою об’єднуючи виходи з різних гілок для прийняття остаточного рішення.
У контексті безпілотних автомобілів вхідні дані можуть представляти різні аспекти середовища, такі як статичні об’єкти (дерева та дорожні поручні), дороги та смуги, світлофори тощо. Ці вхідні дані навчаються в окремих гілках. Під час висновку механізм воріт вирішує, які гілки активувати, а комбайнер збирає їхні виходи, щоб прийняти остаточне рішення.
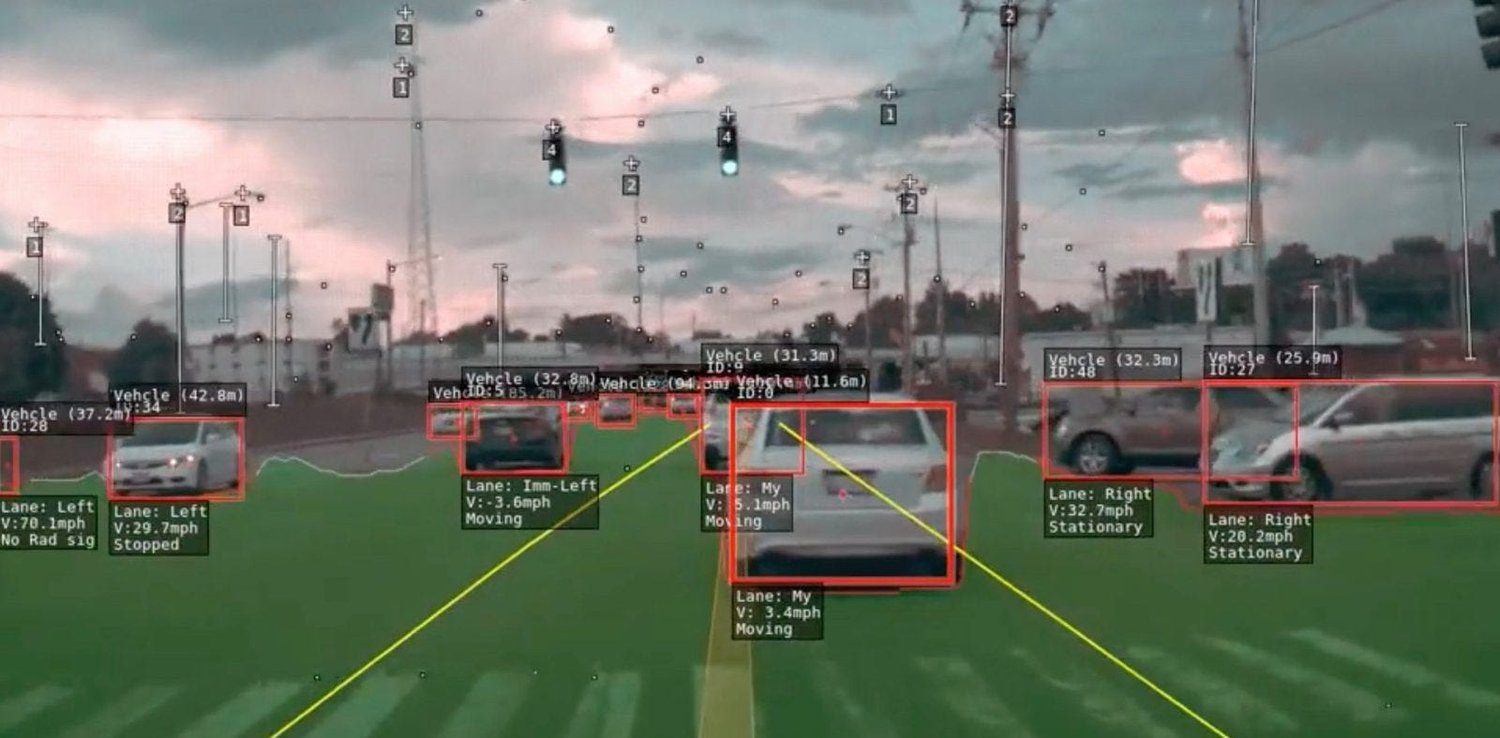 Виявлення швидкості, смуги руху та руху
Виявлення швидкості, смуги руху та руху
Компанія Tesla адаптувала архітектуру HydraNet, включивши спільну магістраль для вирішення проблем із розділенням даних для окремих завдань під час логічного висновку. Спільна магістраль, як правило, модифіковані блоки ResNet-50, дозволяє навчати мережу на даних усіх об’єктів. Специфічні заголовки завдань на основі архітектури семантичної сегментації, як-от U-Net, дозволяють моделі передбачати результати, специфічні для кожного завдання.

HydraNet від Tesla виділяється своєю здатністю проектувати вид з висоти пташиного польоту, створюючи тривимірне зображення навколишнього середовища під будь-яким кутом. Ця підвищена розмірність допомагає автомобілю краще орієнтуватися. Примітно, що Tesla досягає цього без використання датчиків LiDAR. Натомість він покладається лише на два датчики: камеру та радар. Ефективність HydraNet від Tesla дозволяє обробляти інформацію з восьми камер і генерувати сприйняття глибини, демонструючи вражаючі можливості без необхідності використання додаткової технології LiDAR.
#2. ChauffeurNet від Google Waymo
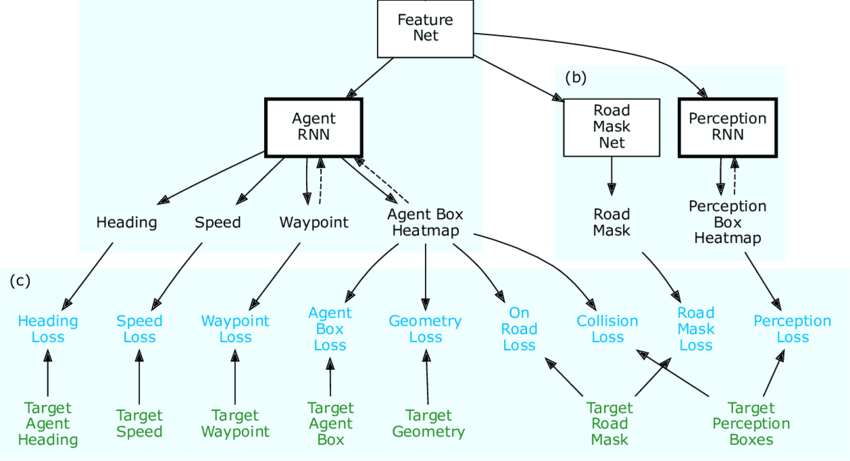
ChauffeurNet — це нейронна мережа на основі RNN, яка використовується Google Waymo для навчання самокерованих автомобілів за допомогою імітаційного навчання. Хоча для генерування траєкторій руху він в основному покладається на RNN, він також містить компонент CNN, відомий як FeatureNet.
Ця мережа згорткових функцій витягує контекстні представлення ознак, які спільно використовують інші мережі, і використовується для вилучення ознак із системи сприйняття.
 Джерело: Researchgate
Джерело: Researchgate
Концепція ChauffeurNet полягає в тому, щоб навчити самокерований автомобіль, імітуючи досвідчених водіїв за допомогою імітаційного навчання. Щоб подолати обмеження, пов’язані з недостатніми реальними навчальними даними, автори статті «ChauffeurNet: Learning to Drive by Imitating the Best and Synthesizing the Worst» представили синтетичні дані.
Ці синтетичні дані вносять різні відхилення, такі як збурення траєкторії, додавання перешкод і створення неприродних сцен. Навчання автомобіля синтетичними даними виявилося ефективнішим, ніж використання лише реальних даних.
У ChauffeurNet система сприйняття не є частиною наскрізного процесу, а діє як система середнього рівня. Це дозволяє мережі мати різні вхідні варіації від системи сприйняття. Мережа спостерігає за зображенням сцени середнього рівня від датчиків, і використовуючи цей вхідний сигнал разом із синтетичними даними, вона імітує поведінку досвідченого водія.
Виокремлюючи задачу сприйняття та створюючи високорівневий огляд навколишнього середовища з висоти пташиного польоту, ChauffeurNet полегшує навчання передачі даних, дозволяючи мережі приймати кращі рішення на основі як реальних, так і змодельованих даних. Мережа генерує траєкторії руху, ітеративно прогнозуючи послідовні точки на шляху руху на основі уявлень середнього рівня. Цей підхід показав багатообіцяючі можливості для ефективнішого навчання самокерованих автомобілів, забезпечуючи шлях до безпечніших і надійніших систем автономного керування.
#3. Частково спостережуваний процес прийняття рішень Маркова, який використовується для самокерованих автомобілів
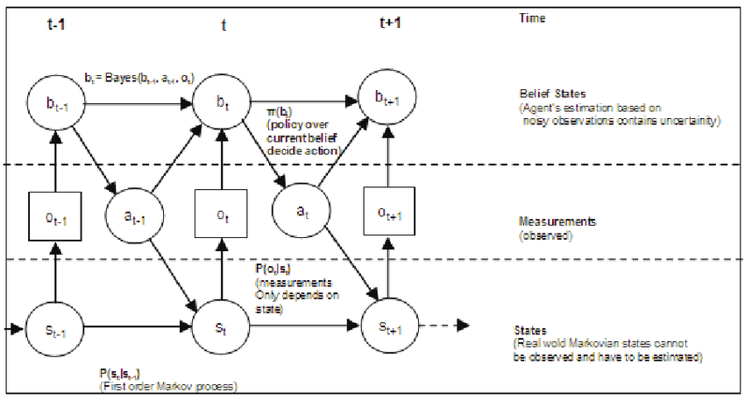
Частково спостережуваний марковський процес прийняття рішень (POMDP) — це математична система, яка використовується в контексті самокерованих автомобілів для прийняття рішень в умовах невизначеності. У реальних сценаріях безпілотні автомобілі часто мають обмежену інформацію про навколишнє середовище через шум датчиків, оклюзії або недосконалі системи сприйняття. POMDP розроблено для обробки такої часткової спостережуваності та прийняття оптимальних рішень, враховуючи як невизначеність, так і доступні спостереження.
У POMDP агент, що приймає рішення, працює в середовищі з частково спостережуваними станами. Агент вживає заходів, а середовище ймовірнісно переходить до нових станів. Однак агент отримує лише часткові спостереження або зашумлену інформацію про справжній стан середовища. Мета полягає в тому, щоб знайти політику, яка максимізує очікувану кумулятивну винагороду з часом, враховуючи невизначеність середовища та спостереження агента.
 Джерело: Researchgate
Джерело: Researchgate
У контексті безпілотних автомобілів POMDP особливо корисний для таких завдань, як планування руху, прогнозування траєкторії та взаємодія з іншими учасниками дорожнього руху. Безпілотний автомобіль може використовувати POMDP для прийняття рішень щодо зміни смуги руху, регулювання швидкості та взаємодії з пішоходами та іншими транспортними засобами, враховуючи невизначеність навколишнього середовища.
POMDP складається з шести компонентів, і його можна позначити як POMDP
M:= (I, S, A, R, P, γ)
де,
Я: Спостереження
S: Кінцева множина станів
A: Кінцевий набір дій
R: функція винагороди
P: Функція ймовірності переходу
γ: коефіцієнт дисконтування для майбутніх винагород.
POMDP можуть бути обчислювально складними через необхідність розглядати кілька можливих станів і спостережень. Проте вдосконалені алгоритми, такі як планування простору переконань і методи Монте-Карло, часто використовуються для ефективного наближення оптимальної політики та забезпечення прийняття рішень у режимі реального часу в безпілотних автомобілях.
Завдяки впровадженню POMDP у свої алгоритми прийняття рішень, безпілотні автомобілі можуть ефективніше та безпечніше керувати складними та невизначеними середовищами, враховуючи невизначеність показань датчиків і приймаючи обґрунтовані рішення для досягнення поставлених цілей.
Автомобіль, який працює як агент, навчається, взаємодіючи з навколишнім середовищем за допомогою навчання з підкріпленням (RL), свого роду машинного навчання. Стан, дія та винагорода є трьома важливими змінними в основі глибокого навчання з підкріпленням (DRL).
Стан: описує поточну ситуацію безпілотного автомобіля в певний момент часу, наприклад його положення на дорозі.
Дія: представляє всі можливі рухи, які може зробити автомобіль, включаючи такі рішення, як зміна смуги руху або регулювання швидкості.
Нагорода: забезпечує зворотний зв’язок з автомобілем щоразу, коли він виконує певну дію. Винагорода може бути як позитивною, так і негативною, і метою DRL є максимізація сукупної винагороди.
На відміну від навчання під наглядом, де алгоритму явно надаються правильні дії, DRL навчається, досліджуючи середовище та отримуючи винагороду на основі своїх дій. Нейронна мережа автомобіля, що керує автомобілем, навчається на даних сприйняття, які включають функції, отримані згортковими нейронними мережами (CNN).
Алгоритми DRL потім навчаються на цих уявленнях, які є маловимірними перетвореннями вхідних даних, що призводить до більш ефективного прийняття рішень під час висновку.
Навчання безпілотних автомобілів у реальних умовах небезпечно та непрактично. Натомість вони навчаються на тренажерах, де немає ризику для безпеки людей.
 Симулятор
Симулятор
Деякі симулятори з відкритим кодом:
Поєднуючи дані про сприйняття з підкріплюючим навчанням, безпілотні автомобілі можуть навчитися орієнтуватися в складних середовищах, приймати безпечні та оптимальні рішення та стати більш вправними в обробці сценаріїв водіння в реальному світі.
поширені запитання
Що таке автономні транспортні засоби?
Автономні транспортні засоби, які зазвичай називають самокерованими автомобілями, — це автомобілі з передовими датчиками та штучним інтелектом, які можуть керувати автомобілем і керувати автомобілем самостійно. Ці транспортні засоби оцінюють навколишнє середовище та приймають рішення про водіння за допомогою камер, LiDAR, RADAR і складних алгоритмів.
Чи безпечні автономні транспортні засоби?
У розробці безпілотних автомобілів безпека стоїть на першому місці. Щоб переконатися, що вони відповідають високим нормам безпеки, ці транспортні засоби проходять ретельне тестування та моделювання. Хоча під час випробувань були випадки, кінцева мета — зробити безпілотні автомобілі більш безпечними, ніж ті, що керуються людьми.
Чи можна використовувати автономні транспортні засоби за будь-якої погоди?
Екстремальні погодні умови, зокрема сильний дощ або сніг, можуть створити проблеми для безпілотних автомобілів. Несприятлива погода може знизити точність датчиків і погіршити здатність керувати автомобілем. Інженери постійно намагаються покращити роботу техніки в несприятливих погодних умовах.
Автономні транспортні засоби – вони дозволені?
Законність автономних транспортних засобів залежить від країни та місця. Щоб запровадити автономні транспортні засоби, багато юрисдикцій переглядають свої закони та правила. Випробування безпілотних автомобілів і обмежене розгортання вже дозволені в деяких регіонах.
Чи потребують автономні транспортні засоби втручання людини?
Більшість доступних на даний момент безпілотних автомобілів мають рівень автоматизації 2 або 3, де іноді їм може знадобитися допомога людини. Проте галузь прагне досягти вищих рівнів автоматизації, таких як рівень 4 або рівень 5, де втручання людини стає мінімальним або непотрібним.
Висновок
Підсумовуючи, можна сказати, що безпілотні автомобілі здатні змінити автомобільну промисловість, підвищивши ефективність і безпеку на дорогах. Ми розглянули всі основні компоненти, які підтримують ці автономні автомобілі, включаючи LiDAR, RADAR, камери та розширені алгоритми.
Хоча прогрес є багатообіцяючим, все ще є важливі проблеми, які необхідно вирішити. Наразі безпілотні автомобілі знаходяться на рівні 2 із 5 рівня вдосконалення, що потребує втручання людини в певних сценаріях. Однак завдяки постійній відданості та інноваціям ми наближаємось до досягнення повної автономності.
Ключові висновки
Удосконалення алгоритмів. Подальша оптимізація алгоритмів має вирішальне значення для покращення сприйняття дороги, особливо в складних умовах, коли може бути відсутнім дорожня розмітка та знаки.
Удосконалення методу зондування: покращення точності та ефективності методів зондування для картографування та локалізації сприятиме досягненню вищого рівня автономності.
Зв’язок між транспортними засобами: Створення пов’язаної та інтелектуальної дорожньої екосистеми стане можливим завдяки розвитку зв’язку між транспортними засобами.
Взаємодія «людина-машина». Заохочення суспільного сприйняття технологій автономного керування потребуватиме вивчення та вирішення проблем, пов’язаних із взаємодією «людина-машина».
Майбутні перспективи: незважаючи на труднощі, на сьогоднішній день досягнуті значні досягнення, і завдяки постійній співпраці та дослідженням безпілотні автомобілі пропонують потенціал для забезпечення безпечнішого та ефективнішого транспортного середовища для всіх.
Ми всі на одному шляху до повністю автономних автомобілів. Коли ми вирішуємо проблеми та стимулюємо інновації, ми наближаємось до того часу, коли транспортні засоби безперебійно керуватимуть нашими дорогами, покращуючи безпеку, навколишнє середовище та зручність для всіх.
Тепер ви можете дізнатися про просторові обчислення та їх застосування в розробці безпілотних автомобілів.