Основні моменти
- Автономні транспортні засоби використовують технологію машинного зору для сприйняття та аналізу навколишнього середовища, що дозволяє ідентифікувати об’єкти, розпізнавати дорожні знаки та орієнтуватися на дорозі.
- Система машинного зору в безпілотних авто включає комплекс камер, периферійних обчислень та алгоритмів штучного інтелекту, що спільно обробляють візуальну інформацію в реальному часі для виявлення закономірностей та об’єктів.
- Машинний зір є ключовим елементом для досягнення повної автономності безпілотних автомобілів, забезпечуючи класифікацію об’єктів, розпізнавання дорожньої розмітки, ідентифікацію знаків та аналіз дорожнього руху. Розвиток ШІ, периферійних обчислень і технологій камер визначає майбутнє автономного транспорту.
Самокеровані автомобілі завжди були предметом значного інтересу. Хоча ми ще не досягли ери повністю автономних автомобілів, вже існують транспортні засоби з удосконаленими системами допомоги водієві (ADAS), здатними автоматично керувати, змінювати смугу руху, паркуватися та використовувати адаптивний круїз-контроль.
Автомобілі з функцією автопілота використовують широкий спектр сенсорів для своїх ADAS, причому машинний зір є основним засобом виявлення, ідентифікації та вимірювання відстані до об’єктів і навколишнього середовища. Без машинного зору реалізація безпілотних авто з круїз-контролем та автопілотом була б малоймовірною.
Що таке машинний зір?

Машинний зір – це технологія, що надає машинам можливість бачити та ідентифікувати об’єкти у їхньому оточенні. Це спеціалізована область комп’ютерного зору, орієнтована на промислові застосування, такі як виявлення об’єктів в автономних пристроях, зокрема роботах і транспортних засобах.
Сучасний машинний зір використовує алгоритми глибокого навчання, наприклад, згорткові нейронні мережі (CNN), для створення надійних та узагальнених моделей, здатних точно розпізнавати об’єкти в різних умовах. Це забезпечує реалізацію машинного зору в різноманітних сферах, де потрібна висока надійність, як-от виробництво, сільське господарство, робототехніка та автомобільна промисловість.
Як працює машинний зір у безпілотних автомобілях?
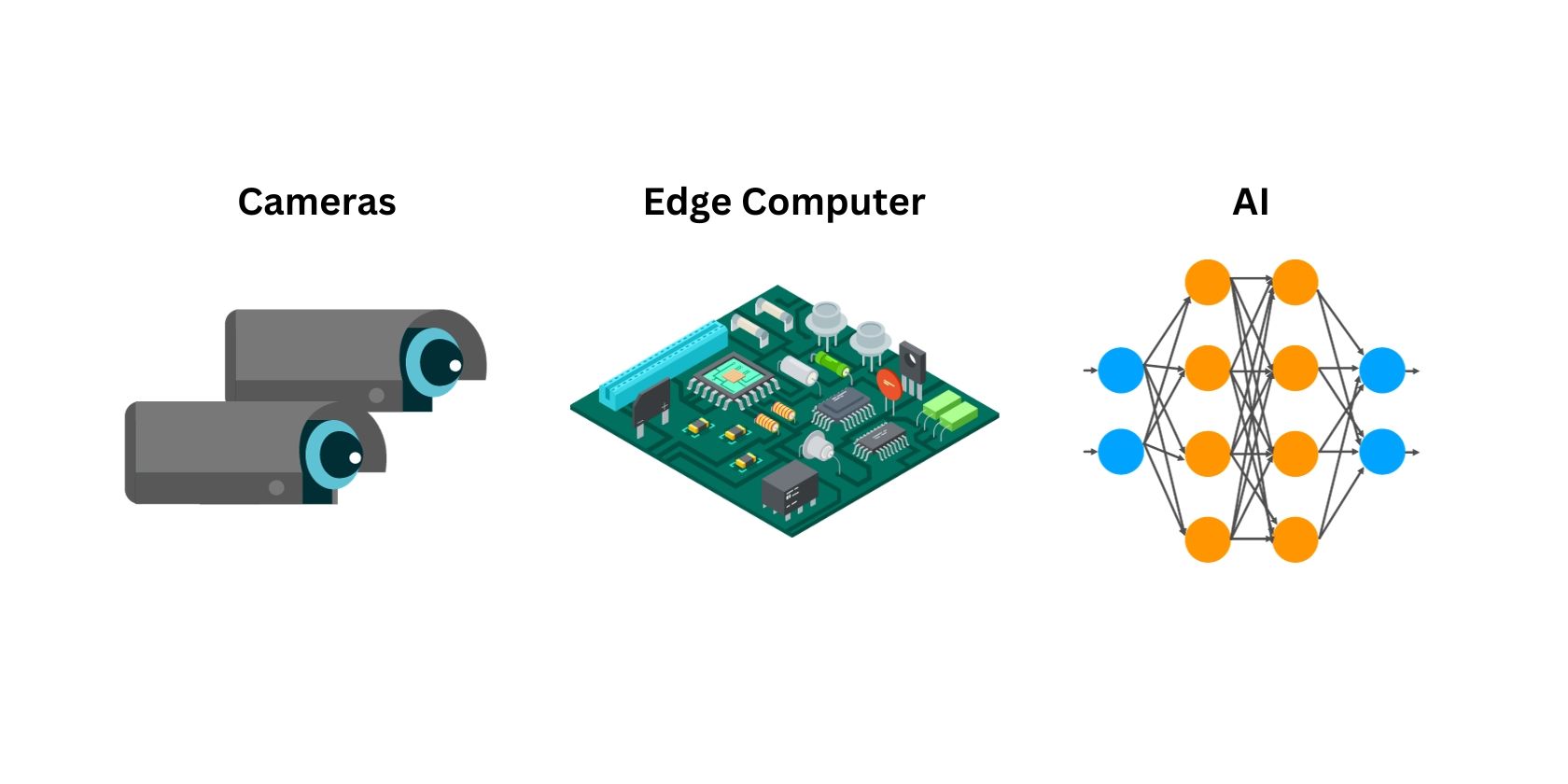
Функціонування машинного зору в автономних автомобілях зазвичай поділяють на три етапи: систему камер, обробку даних (обчислення на периферії) та штучний інтелект (ШІ). Цей комплекс технологій дозволяє автономному автомобілю “бачити”, “думати” та ідентифікувати дорожні знаки й перешкоди під час руху. Розглянемо докладніше кожен етап, щоб зрозуміти, як ці компоненти взаємодіють для створення системи машинного зору безпілотного автомобіля.
Система камер
Машинний зір використовує камери для отримання візуальної інформації про навколишнє середовище. У безпілотних автомобілях встановлюють кілька камер навколо автомобіля для збору максимальної кількості візуальних даних.
У камерах машинного зору використовуються два основні типи датчиків: комплементарні металооксидні напівпровідники (CMOS) та пристрої із зарядовим зв’язком (CCD). Для автономних автомобілів зазвичай вибирають CMOS через їхню високу швидкість зчитування, потужну вбудовану електроніку та можливості паралельної обробки, хоча вони схильні до шумів і артефактів. Різні рішення, такі як спеціальні режими освітлення, цифрове нічне бачення та фільтри, допомагають сенсору CMOS працювати в умовах недостатнього освітлення.
У безпілотних автомобілях камери розміщують на певній відстані одна від одної для створення стереоскопічного зору. Стереоскопічний зір – це здатність об’єднувати кілька візуальних входів, створюючи сприйняття глибини або тривимірності в об’єктах і навколишньому середовищі. Це дозволяє автомобілям виконувати тріангуляцію та обчислювати приблизну відстань між об’єктом і автомобілем.
Подібно до того, як люди мають два ока, що забезпечує стереоскопічний зір, цей принцип застосовується і в автомобілях. Ви можете перевірити це, закривши одне око та вибравши невеликий об’єкт на столі. Поставте руку біля об’єкта, переконавшись, що кінець об’єкта знаходиться на відстані щонайменше двох дюймів від неї. Затримайтеся на кілька секунд і оцініть, наскільки впевнені ви у своїй оцінці. Потім відкрийте обидва ока і відчуйте, як покращилося сприйняття глибини.
Обчислення на периферії
Коли система камер самокерованого автомобіля збирає дані, бортовий комп’ютер (периферійний процесор) обробляє всю отриману інформацію в режимі реального часу, щоб негайно оновлювати систему щодо стану навколишнього середовища. Хоча типові завдання машинного зору можуть заощаджувати ресурси за допомогою хмарних обчислень, для безпілотних автомобілів підключення до хмари несе занадто великий ризик, навіть якщо мова йде про аутсорсинг обробки даних.
Використання периферійних обчислень для обробки вхідних даних усуває затримки і забезпечує отримання, обробку та передачу даних в реальному часі. Периферійні комп’ютери для безпілотних автомобілів використовують спеціалізовані процесори з інтегрованими графічними процесорами ШІ, такими як NVIDIA Tensor Core і ядра CUDA.
Алгоритми штучного інтелекту
Алгоритми завжди відігравали важливу роль у машинному зорі. Саме алгоритм дозволяє комп’ютеру ідентифікувати всі закономірності, форми та кольори, що надаються системою камер. Застосування штучного інтелекту замість традиційних алгоритмів машинного зору значно покращує здатність безпілотних автомобілів надійно розпізнавати об’єкти, дорожні знаки, розмітку та світлофори. Для навчання самокерованих автомобілів використовується багато алгоритмів ШІ, серед яких:
- YOLO (You Only Look Once): Алгоритм виявлення об’єктів у реальному часі, який визначає та відстежує об’єкти в полі зору автомобіля.
- SIFT (Scale-Invariant Feature Transform): використовується для виділення характерних ознак, допомагає автомобілю розпізнавати орієнтири та об’єкти навколо нього.
- Гістограма орієнтованих градієнтів (HOG): використовується для розпізнавання об’єктів, фокусується на вилученні локальних закономірностей і градієнтів зображень.
- TextonBoost: алгоритм, що допомагає ідентифікувати об’єкти, аналізуючи текстури навколишнього середовища.
- AdaBoost: використовується для класифікації даних, AdaBoost об’єднує кілька слабких класифікаторів для прийняття зважених рішень щодо об’єктів і перешкод на шляху автомобіля.
Важливість машинного зору в безпілотних автомобілях
 Автор зображення: Automobile Italia/Flickr
Автор зображення: Automobile Italia/Flickr
Машинний зір – це основний спосіб, за допомогою якого безпілотний автомобіль сприймає та розуміє навколишнє середовище. Без нього безпілотні автомобілі, ймовірно, повернулися б до першого рівня автономності та, можливо, ніколи б не досягли повної автономії.
Завдяки машинному зору безпілотні автомобілі можуть класифікувати об’єкти, визначати смуги руху та сигнали, ідентифікувати дорожні знаки та розпізнавати дорожній рух.
Хоча наразі багато безпілотних автомобілів використовують різні сенсори, такі як LIDAR, RADAR і SONAR, усі вони значною мірою покладаються на машинний зір для сприйняття навколишнього середовища, розпізнавання об’єктів і розуміння значень дорожніх знаків та світлофорів. Усі додаткові сенсори призначені лише для покращення машинного зору та підвищення безпеки людей, тварин і майна.
Машинний зір може функціонувати автономно без підтримки інших сенсорів, забезпечуючи можливості автопілота. Наприклад, останні моделі безпілотних автомобілів Tesla відмовилися від RADAR та покладаються виключно на машинний зір для своєї системи автопілота.
Хоча це не применшує цінності інших сенсорних технологій, це підкреслює важливість і потужність машинного зору в безпілотних автомобілях.
Майбутнє машинного зору в автономних транспортних засобах
Машинний зір є основою для розробки безпілотних автомобілів. Завдяки машинному зору автомобілі можуть “бачити” і сприймати довкілля так само, як і люди. Хоча ще існують певні виклики, переваги машинного зору в плані безпеки та навігації є надзвичайно важливими. Майбутній розвиток штучного інтелекту, периферійних обчислень та технологій камер, безсумнівно, зробить безпілотні автомобілі більш досконалими і, ймовірно, виведе їх на вищий рівень автоматизації.